

目录:
- IPM短路保护原理
- 短路时间 (Tsc) 的组成部分
- 案例研究
要点总结
RC滤波器、单电阻采样电路、采样信号、IGBT驱动、IPM设计、过补偿现象、滤波电路
智能电源模块(IPM) 具有内置的监控和保护机制,大大简化了用户应用。
其中,短路保护是核心安全功能之一。IPM采用短路容错电路。 IGBT用作功率控制开关,并集成了专用的过流保护电路。该电路通过ITRIP引脚监测过流和短路事件。一旦检测到异常,它会触发故障信号并立即关闭所有六个IGBT 。
这种设计简化了客户的电路布局,同时确保了系统的高可靠性。以下部分简要概述了如何在IPM设计中正确实现短路保护。

短路时间 (Tsc) 的组成部分包括以下主要因素:
1.外部RC滤波器的时间常数
2. IPM 内的驱动程序延迟
3.采样电路延迟
外部RC滤波器的时间常数: RC滤波器常用于平滑电路信号,但它们也会引入一定的延迟。时间常数表示为 τ = R × C ,其中 R 为电阻,C 为电容。在设计中,必须在滤波效果和响应速度之间取得平衡,以确保这种延迟不会影响保护的及时性。
IPM内部驱动延迟:内部栅极驱动电路在接收到控制电路的信号后,需要一定时间才能完全导通或关断IGBT。此延迟也会影响Tsc,具体数值请参考IPM数据手册。
采样电路延迟:在常见的应用中,例如 家用电器中广泛使用单电阻采样电路,通常与 RC 型低通滤波器结合使用,以有效抑制采样电阻上的高频噪声。
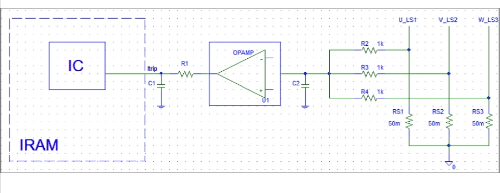
下面展示了一个使用单电阻采样方法的示例电路。

由于线路本身和电阻器的漏感,采样信号可能会失真。考虑到这一点,我们假设使用下图所示的采样电阻方案:

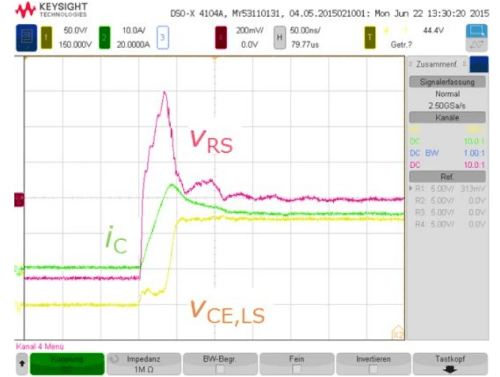
在环境条件下 T = 25℃ , V DC = 125 V , di/dt = 590 A/µs ,测得的波形如下所示。

测试结果表明,感应电压 U ind为 7 V。
基于此,漏感 L sh sub> 计算为 7 V 除以 (590 A/µs),得出 L sh ≈ 11.9 nH。
我们可以获得:
显然,当以下等式 h 成立时,滤波效果最佳。
因此,我们可以得出:
将先前获得的参数代入计算:漏感 Ls = 11.9 nH,采样电阻Rₛ = 30 mΩ , R1 = 100 Ω ,我们计算得出C1 = 3.966 nF 。
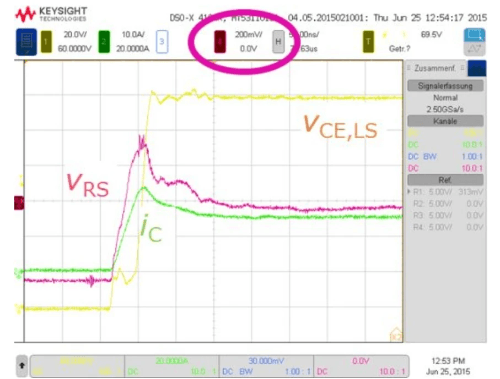
然而,出于实际考虑,我们决定使用稍小的电容值,即 3.3 nF。实际测试表明,使用 100 欧姆电阻和 3.3 nF 电容会导致轻微的过压缩:
经过微调,使用470 Ω 和 680 pF 的电阻获得了更好的结果:
因此,计算得到的外部RC滤波器的时间常数为0.32微秒。然而,在实际应用中,为了确保稳定性和与不同器件参数的兼容性,通常建议将时间常数设置为1毫秒左右,最好不超过2毫秒,以留出安全余量。
滤波器电路时间常数是两级时间常数之和: (100 Ω x 1 nF)+(1.8 kΩ x 1 nF)= 1.9 µs。
在设计包含比较器的过电流保护电路时(见下例),RC参数的仔细选择至关重要。整个滤波器的时间常数不仅要考虑两级RC网络,还要考虑比较器本身的响应时间。
概括
总之,在设计IPM短路保护系统时,仔细规划滤波电路参数至关重要。滤波电路的延迟和比较器响应时间的总和必须小于总短路保护响应时间(Tsc)。
为确保系统安全性和可靠性,Tsc 必须始终小于 IPM 可容忍的最大短路持续时间。